

Технические характеристики 1061898
-
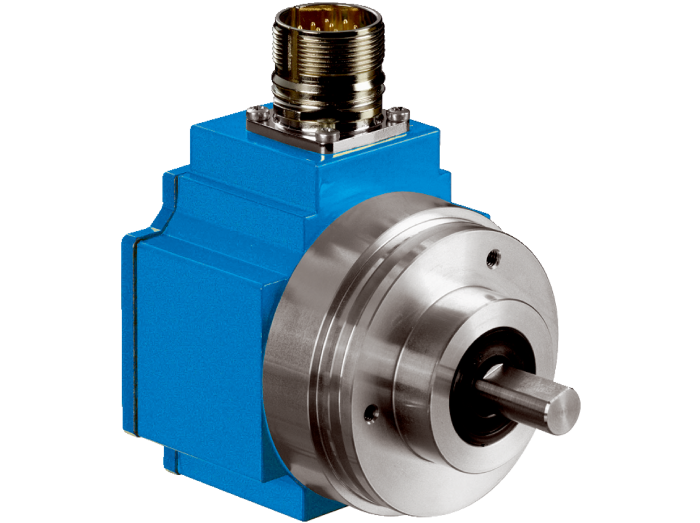
Соответствие механического интерфейса: Конусный вал и способ фиксации в корпусе двигателя
-
Электрическая совместимость: Поддержка протокола HIPERFACE контроллером или сервоусилителем
-
Напряжение питания: Стандартный диапазон 7–12 В DC (требует уточнения по схеме подключения)
-
Температурный диапазон: Эксплуатация в условиях нагрева обмоток мотора (обычно до +115°C)
-
Тип подключения: Проверьте спецификацию разъема или кабельного вывода (индекс K21)
-
Ограничение: Несовместим с чисто цифровыми интерфейсами (EnDat 2.2, BiSS, HIPERFACE DSL) без преобразователей
-
Сертификация: CE, RoHS
Если вы не нашли продукцию бренда SICK на нашем сайте, пожалуйста, свяжитесь с нами. Мы приложим все усилия, чтобы найти и предложить вам необходимый товар в кратчайшие сроки.
Можно ли заменить SRS50 на SRM50?
Электрически они совместимы, но SRM50 поддерживает многооборотный режим. Требуется перенастройка параметров энкодера в программном обеспечении привода.
Нужна ли юстировка после установки?
Да, при установке на сервомотор требуется процедура фазировки (Alignment) для синхронизации нулевой метки энкодера с магнитными полюсами ротора.
Что означает суффикс K21?
Это специальное исполнение, которое может касаться длины вала, типа подшипников или предустановленных параметров в EEPROM. Перед заказом сверяйте серийный номер с шильдиком оригинала.
Подробнее
Если вы не нашли продукцию бренда SICK на нашем сайте, пожалуйста, свяжитесь с нами. Мы приложим все усилия, чтобы найти и предложить вам необходимый товар в кратчайшие сроки.




